Jamming Robot
Category: Back-End Project
Back to Home PageObjective
In this I had to build a pipeline to find optimum tension and compressions of material for a soft robot. Using those information gained from the pipeline, I coded a jamming robot.
Role
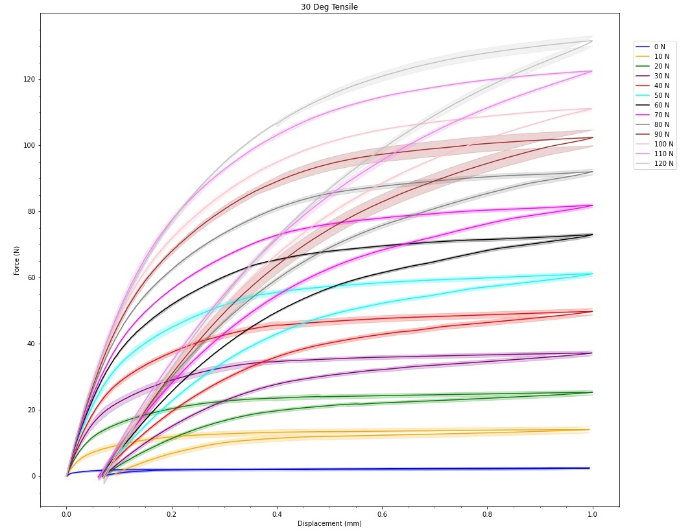
- Developed pipeline to parse 1170 raw data files of tensions and compressions of a miniature soft robotic system.
- Increased the efficiency of data processing by 10 times using sorting algorithms and python scripting.
- Utilized processed data to increase the reliability by 25% of the miniature soft robotic system and calibrated the system to achieve maximum performance.
Pictures