Programmable Robotic Car
Category: Back-End Project
Back to Home PageObjective
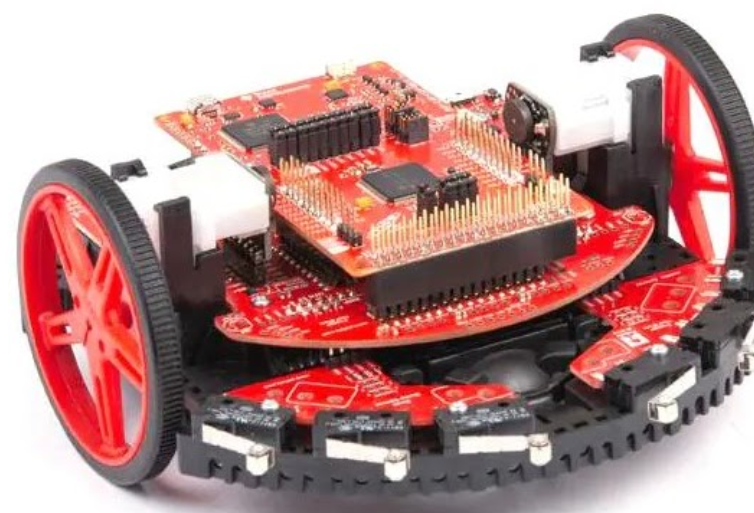
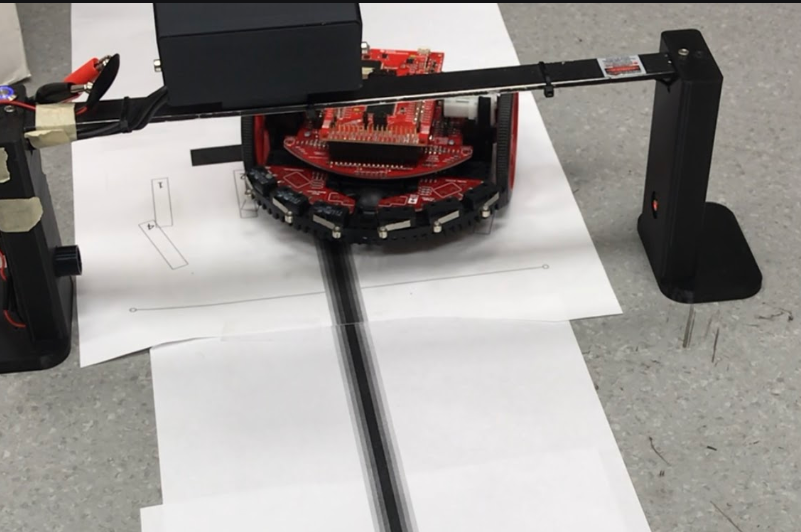
Use concepts like PID, unit testing and hardware debugging to program the car to navigate through a track following the black center line.
Role
- Calibrated eight sensors and processed those sensor data values to find optimal proportional component (Kd), derivative component (Kp) and speed for better steering through the track.
- Coded the car to follow a track using C based programming.
Pictures
×
![]()